微服务 (uService )
概述
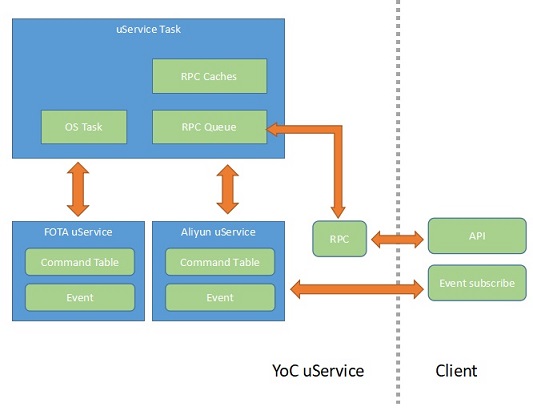
uService (微服务.md) 是一种支持RPC请求/应用的交互,并支持状态消息发布的一种服务机制,客户端可以通过发送请求消息并待回复的方式调用uService(微服务.md)提供的服务,也可以通过订阅服务的事件,来处理服务的事件状态。
serviceTask (服务任务)是利用操作系统的多任务系统,实现消息的分发机制,一个 serviceTask中创建一个OS 的Task。一个serviceTask 下可以注册多个微服务,同一个服务任务下的所有微服务的消息采用先进先处理的顺序执行。
接口定义
typedef struct uservice uservice_t;
typedef struct rpc_buffer rpc_buffer_t;
RPC
typedef struct _rpc_t {
uservice_t *srv;
uint32_t cmd_id;
rpc_buffer_t *data;
} rpc_t;
- cmd_id:RPC 序号
- data:存RPC相关参数的buffer
rpc_process_t
typedef struct {
int cmd_id;
process_t process;
} rpc_process_t;
RPC 初始化
int rpc_init(rpc_t *rpc, int cmd_id, int timeout_ms);
初始化 RPC,设置 RPC 的命令号(cmd_id), 命令调用的超时时间(timeout_ms),单位毫秒
- 参数:
- rpc:rpc
- cmd_id:RPC 的命令号
- timeout_ms:命令调用等待超时时间,0时为异步调用,调用者立即返回,等于 AOS_WAIT_FOREVER为同步调用,等到服务端命令执行完,当 timeout_ms 大于0时,为超时调用,调用者指定的时间内等待服务端返回,如果服务器未返回,则超时退出
- 返回值:
- 0:成功
- -ENOMEM:内存不足
- -EINVAL:无效参数
RPC 写参数复位
void rpc_put_reset(rpc_t *rpc);
清空 rpc 内部的参数。rpc 参数是调用者向服务端传递输入参数,也是服务端向调用者反回参数。编写服务端程序时,在处理完成 rpc 的参数,需要向调用者返回值时,通过调用该函数,清空参数区,然后通过 rpc_put_xxx 函数向 rpc 写入返回值。
RPC 写入参数
int rpc_put_int(rpc_t *rpc, int v);
int rpc_put_uint8(rpc_t *rpc, uint8_t v);
int rpc_put_double(rpc_t *rpc, double v);
int rpc_put_point(rpc_t *rpc, const void *v);
int rpc_put_buffer(rpc_t *rpc, const void *data, size_t size);
int rpc_put_string(rpc_t *rpc, char *str);
向 rpc 参数区写入参数, rpc 的参数可以写入多个参数,根据写入的顺序存放。参数区可以写入 int、uint8_t、double、point、string、array 类型的数据。
- 返回值:
- 0:成功
- -ENOMEM:内存不足
RPC 参数读取复位
void rpc_get_reset(rpc_t *rpc);
RPC 参数区读取复位。rpc 参数区的参数通管 rpc_get_xxx 一组函数读取,每调用一次读取函数则取出一个参数,序号递增,如果需要从头重新读取参数,则通过 rpc_get_reset 函数,将参数序号移到起始位置。
RPC 参数读取
int rpc_get_int(rpc_t *rpc);
uint8_t rpc_get_uint8(rpc_t *rpc);
double rpc_get_double(rpc_t *rpc);
char *rpc_get_string(rpc_t *rpc);
void *rpc_get_point(rpc_t *rpc);
void *rpc_get_buffer(rpc_t *rpc, int *count);
从参数区读取参数,在参数读取时,要调用与写入时的参数顺序一致,参数区的参数是顺序读取,每调用一次 rpc_get_xxx 函数,则依次读出一个参数。参数读取类型不一致时,会导致异常。 返回参数值。
RPC 应答
void rpc_reply(rpc_t *rpc);
该函数在编写服务端时调用,当服务端处理完一条 rpc 时,必须调用该函数完成 rpc 的任务处理。
RPC 回收
void rpc_deinit(rpc_t *rpc);
该函数在调用端执行,当调用者使用 uservice_call 函数调用 rpc时,在处理完 rpc 返回值后,需要调用 rpc_deinit 函数回收 rpc 资源。
微服务 (uService)
创建微服务
uservice_t *uservice_new(const char *name, process_t process_rpc, void *context);
根据指定的微服务名称,上下文、最大命令ID,创建微服务,创建成功返回 uservice_t 指针,失败返回NULL
- 参数:
- name:服务名字
- process_rpc:服务远程调用处理函数
- context:服务自定义上下文,用户在编写微服务处理函数时,可使用该上下文
- 返回值: 创建成功返回 uservice_t 指针,失败返回NULL
释放微服务
void uservice_destroy(uservice_t *srv);
释放微服务 srv 所占用所有资源,释放srv 之前,需要确定 众uservice_task 中移出 uService
微服务 rpc 处理函数
typedef int (*process_t)(void *context, rpc_t *rpc);
微服务的远程调用(RPC) 的主处理函数,在微服务开发时,尽可能减少 process_rpc 的处理时间。
- context:创建微服务时传入的 context
- rpc:远程序调用对象
同步调用微服务命令
int uservice_call_sync(uservice_t *srv, int cmd, void *param, void *resp, size_t resp_size);
向微服务发送一条同步执行命令
- 参数:
- srv:微服务
- cmd:指定需要执行的命令号
- param:命令的参数
- resp:命令的返回值
- resp_size:命令返回值空间大小
- 返回值: 调用成功,返回0,否则返回 -1
异步调用微服务命令
int uservice_call_async(uservice_t *srv, int cmd, void *param, size_t param_size);
向微服务发送一条异步执行命令
- 参数:
- srv:微服务
- cmd:指定需要执行的命令号
- param:命令的参数
- param_size:命令参数空间大小
- 返回值: 调用成功,返回0,否则返回 -1
自定义调用微服务命令
int uservice_call(uservice_t *srv, rpc_t *rpc);
使用自定义 rpc 实现微服务的命令调用,该命令可以通过 rpc_t 实现同步、异步、超时调用,也可以用 rpc_put_xxx 函数,向 rpc 中传入多个参数。服务器也可以通过 rpc 返回多个数据,可以实现复杂参数传输调用。
- 参数:
- srv:微服务
- rpc:调用的 RPC 指令
- 返回值: 调用成功,返回0,否则返回 -1
微服务锁操作
void uservice_lock(uservice_t *srv);
void uservice_unlock(uservice_t *srv);
微服务进程
int uservice_process(void *context, rpc_t *rpc, const rpc_process_t rpcs[]);
微服务事件订阅
void uservice_subscribe(uservice_t *srv, uint32_t event_id);
该函数用于微服务中,调用该函数订阅事件,并将事件发送到微服务的 RPC 任务队列中, RPC 的 cmd_id 等于 event_id,通过 rpc_get_pointer 可以获取 事件的 data 参数。
struct demo_service {
uservice_t *srv;
} demo_svr;
static void process_rpc(void *context, rpc_t *rpc)
{
switch (rpc->cmd_id) {
case EVENT_NETMGR_GOT_IP: {
/* EVENT_NETMGR_GOT_IP 事件处理 */
void *data = rpc_get_pointer(rpc);
if (data != NULL) {
// TODO:
}
...
break;
}
...
}
rpc_reply(rpc);
}
void demo_service_init()
{
/* 创建一个微服务 */
demo_svr.srv = uservice_new("demo", process_rpc, NULL);
/* 订阅微服务事件 “EVENT_NETMGR_GOT_IP”*/
uservice_subscribe(demo_svr.srv, EVENT_NETMGR_GOT_IP);
}
事件
YoC 中,支持全局事件,已定义的事件在 include/yoc/eventid.h 文件中。事件有两种,一种是普通事件,事件的 event_id 由用户定义,由于事件的ID是全局唯一,用户自定义事件时,不能与系统事件冲突。一种是设备(网络)句柄数据可读事件,当设备有数据可读时,会触发 fd 事件。
事件服务初始化
int event_service_init(utask_t *task);
事件订阅
void event_subscribe(uint32_t event_id, event_callback_t cb, void *context);
void event_subscribe_fd(uint32_t fd, event_callback_t cb, void *context);
typedef void (*event_callback_t)(uint32_t event_id, const void *data, void *context);
event_subscribe 订阅普通事件,event_subscribe_fd 订阅设备(网络)句柄数据可读事件
- 参数:
- event_id:事件号, event_subscribe_fd 函数,fd 为设备/网络句柄。
- cb:事件处理函数,该参数不能为 NULL,否则会触发异常
- context:用户数据,该数据会传入到 cb 的 context 参数中
- 返回值: 无
事件订阅取消
void event_unsubscribe(uint32_t event_id, event_callback_t cb, void *context);
void event_unsubscribe_fd(uint32_t fd, event_callback_t cb, void *context);
取消事件订阅,取消事件订阅时,要求传入的参数与订阅时的参数一致方可取消
- 参数:
- event_id:事件号, event_subscribe_fd 函数,fd 为设备/网络句柄。
- cb:事件处理函数,该参数不能为 NULL,否则会触发异常
- context:用户数据,该数据会传入到 cb 的 context 参数中
- 返回值: 无
事件发布
void event_publish(uint32_t event_id, void *data);
void event_publish_fd(uint32_t fd, void *data, int sync);
void event_publish_delay(uint32_t event_id, void *data, int timeout_ms);
发布事件
- 参数:
- event_id:事件号, event_publish_fd 函数,fd 为设备/网络句柄。
- data:事件附带数据,该数据会传到订阅者的回调函数参数 data中,由于事件是异步处理,使用者要小心使用 data 的作用域,订阅者能正常访问该数据
- sync:同步标志。1:同步,0:异步
- timeout_ms:延时时间
- 返回值: 无
微服务任务 (uTask)
创建微服务任务
utask_t *utask_new(const char *name, size_t stack_size, int queue_length, int prio);
参数:
- name:utask名
- stack_size:栈大小
- queue_length:队列个数
- prio:优先级
返回值:
- 非NULL:成功
- NULL:失败
释放微服务任务
void utask_destroy(utask_t *task);
向微服务任务中添加(删除)微服务
void utask_add(utask_t *task, uservice_t *srv);
void utask_remove(utask_t *task, uservice_t *srv);
等待微服务任务退出并收回占用资源
void utask_join(utask_t *task);
微服务锁操作
void utask_lock(utask_t *task);
void utask_unlock(utask_t *task);
设置看门狗超时时间
void utask_set_softwdt_timeout(int ms);
示例代码
服务接口及事件定义
#ifndef DEMO_SERVICE_H
#define DEMO_SERVICE_H
#define EVENT_A 0x1000
#define EVENT_B 0x1001
#define EVENT_C 0x1002
int demo_add(int a, int b);
#endif
服务实现
#include <yoc/uservice.h>
struct demo_uservice {
uservice_t *srv;
int a, b, c;
rpc_t *current_cmd;
rpc_t *current_oob;
};
/* cmd 列表 */
enum DEMO_CMD {
CMD_1 = 0,
CMD_2 = 1,
CMD_RECV,
CMD_DATA = 10,
CMD_MAX
};
/* 事件ID */
#define EVENT_A 0x1000
#define EVENT_B 0x1001
#define EVENT_C 0x1002
struct cmd_param {
int a, b, c;
};
/* 微服务处理函数*/
static int process_rpc(void *context, rpc_t *rpc)
{
struct demo_uservice *d = (struct demo_uservice *)context;
if (rpc->cmd_id < CMD_DATA) {
d->current_cmd = rpc;
}
switch (rpc->cmd_id) {
case CMD_RECV:
// d->current_cmd = rpc;
break;
case CMD_1: {
/* 加法cmd 处理 */
struct cmd_param *p = (struct cmd_param *)rpc_get_point(rpc);
d->c = p->a + p->b;
/* 发布 EVENT_A 事件 */
event_publish(EVENT_A, (void *)d->c);
break;
}
case CMD_DATA:
if (d->current_cmd != NULL) {
rpc_reply(d->current_cmd);
d->current_cmd = NULL;
event_publish(EVENT_A, (void *)d->c);
}
/* rpc应答 */
rpc_reply(rpc);
break;
default:
/* rpc应答 */
rpc_reply(rpc);
break;
}
return 0;
}
static struct demo_uservice demo;
void demo_service_init()
{
static utask_t *srv;
/* 创建微服务 */
srv = utask_new("demo_srv", 2 * 1024, QUEUE_MSG_COUNT, AOS_DEFAULT_APP_PRI);
/* 创建utask */
demo.srv = uservice_new("demo", process_rpc, &demo);
/* 将微服务加入到utask中 */
utask_add(srv, demo.srv);
}
void demo_add(int a, int b)
{
struct cmd_param cmd;
cmd.a = a;
cmd.b = b;
int c;
/* 微服务同步调用 CMD_1 */
uservice_call_sync(demo.srv, CMD_1, &cmd, &c, sizeof(int));
}
服务调用
int demo_subscribe(uint16_t event_id, event_callback_t cb, void *context)
{
return uservice_subscribe(demo.srv, event_id, cb, context);
}
static void event_a_callback(uint16_t event_id, const void *data, void *context)
{
printf("%d\n", (int)data);
}
void demo_test()
{
demo_service_init();
demo_subscribe(EVENT_A, event_a_callback, NULL);
demo_add(1, 4);
}